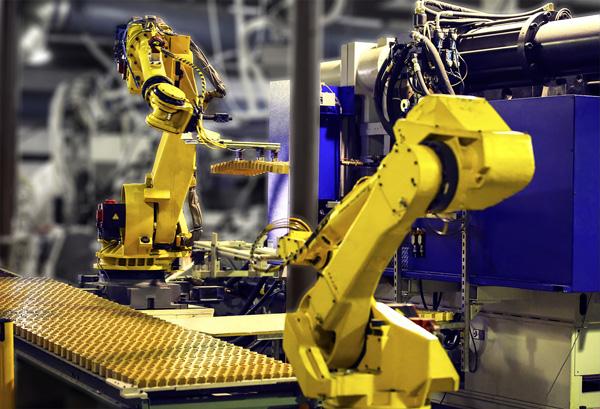
산업용 로봇은 생산 및 응용 분야에서 지속적으로 확장되어 로봇 생산은 끊임없이 새로운 요구 사항을 제시하여 로봇 기술의 향상을 촉진합니다. 동시에, 로봇의 성능과 인텔리전스 수준의 향상은 또한 생산에서 사람들의 역할을 대체하고, 다양한 생산 작업에서 사람들을 대체하고, 기업의 생산 활동에서 주요 노동력이되는 로봇을 만듭니다. 대부분의 육체 노동의 대체에서부터 정신 작업의 일부에 이르기까지 생산에 사용 된 산업용 로봇의 역할은 통합 된 자동화 된 생산 시스템으로 진화하여 관리 조정의 역할을 수행했습니다.
고립 된 로봇은 생산에 실질적인 가치가 없습니다. 생산 과정에서 로봇의 역할과 역할은 생산 내용, 제품 구조, 공정 요구 사항 및 기타 요인에 따라 다른 최종 실행 장치 (손)의 구조와 기능에 실제로 반영되어로드, 언로드, 조립, 처리를 실현합니다 테스트. 지능형 판단과 같은 다양한 독립 또는 복합 업무 기능.
생산 및 가공을 수행하고 제품에 부가가치를주는 가공 로봇의 경우, 용접, 페인트, 연삭, 검사 및 기타 작업을 수행하기 위해 다양한 가공 도구 (용접 건, 스프레이 건, 나이프, 연삭 휠 및 연마 휠 등) 조립과 같은 생산 공정은 생산에서 중요한 역할을했으며 공정, 정밀도, 생산 효율성 및 품질 측면에서 대체 할 수 없습니다. 그러나 작업 기계 또는 기타 자동화 장비와 협력하거나 픽 - 앤 - 플레이스 (pick-and-place) 재료를 독립적으로 구현하는 보조 로봇의 경우 클로의 구조와 기능은 비교적 간단하며 공정, 생산 효율성, 품질 등 생산 지원 작업, 대안.
현재 다양한 생산 단계에서 널리 사용되는 산업용 로봇의 약 75 %가 간단한 픽앤 플레이스 (pick and place) 재료의 보조 작업에 종사하고 있습니다. 따라서 생산 지원 역할을 수행하는 것은 여전히 산업용 로봇 생산 어플리케이션의 주류입니다. 다양한 종류의 구조와 기능으로 산업용 로봇이 생산에서 중요한 역할을하는 경우 보조 기계를 추가하여 로봇을 가동 슬라이드 테이블, 가이드 레일 또는 롤러에 장착하여 로봇의 생산 작업을 확장하십시오. 공간은 로봇에 다리와 발을 부착하고 하나 이상의 움직임 치수를 달성하기 위해 날개를 삽입하여 로봇의 작업 능력과 응용 분야를 크게 향상시키는 것과 같습니다.
손과 발의 로봇으로 CCD와 센서와 같은 시각적 감지 장치가 설치되면 눈과 두뇌를 로봇에 가하는 것과 같아 시각화, 분석 및 판단, 시스템과 같은 기능을 갖게됩니다 피드백. 생산 시스템 통합 환경에서 분석 및 판단, 오류 처리 및 생산 관리와 같은 인텔리전트 작업 실현.
따라서 고효율 로봇 엔드 이펙트 장치 (핸드 그리퍼), 로봇 동작 공간의 보조 메커니즘의 지속적인 확장, 로봇의 시각, 인식, 탐지 및 분석을 향상시키는 지능적인 기능이 상태와 역할입니다 생산 용 산업용 로봇의 중요한 구체화.

 귀하의 메시지는 20-3,000 자 사이 여야합니다!
귀하의 메시지는 20-3,000 자 사이 여야합니다!